日々のキャリブレーションを怠ることなく実施し施工します。
ICT建機はマシーンコントロールとマシーンガイダンスと大きく2つに分かれるが、マシーンコントロール機能のあるものは、マシーンガイダンスとしても使用することができることから、掘削途中に巨石などがでた場合には、監督職員と協議しその箇所のみをガイダンス機能で掘削することもできるため便利です。
また、マシーンコントロールで施工した方がガイダンスよりも仕上がりが良く、出来形も良好で、特に水中掘削等で施工履歴データによる出来形管理をおこなう場合には有効です。
施工途中で、ICT建機を交替するとキャリブレーションで誤差が生じる場合があるが、キャリブレーションの結果が重要であることから、TS等で更に良く確認するとともにあまりにも誤差が大きい場合には、バケットの種類や爪の長さ、どこでキャリブレーションをおこなっているのか等の基本事項を再度確認することが重要です。
ICT建機による施工方法
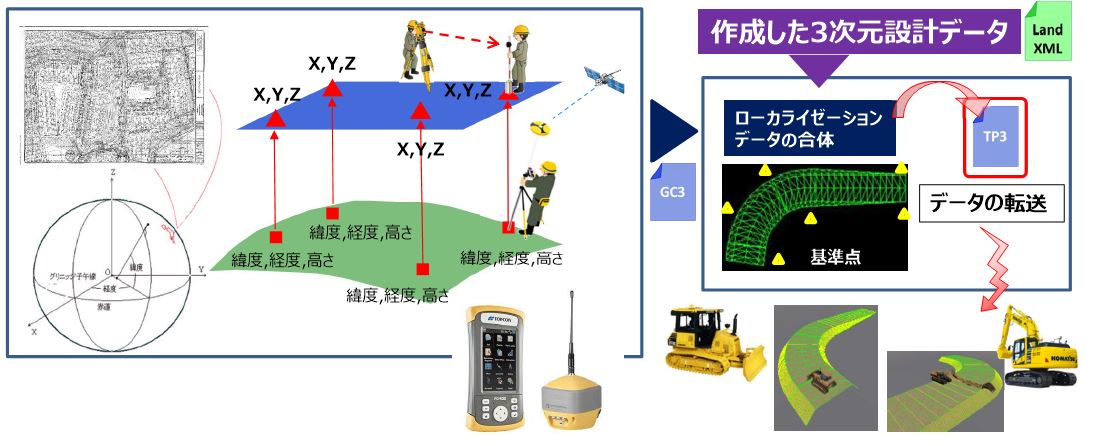
ローカライゼーション
※弊社ではVRSまたはRTK方式にて施工します。
弊社におけるICT建機による施工ではまず「ローカライゼーション作業」を行います。
※ローカライゼーション作業とは、GPSより得られるGNSS座標を平面図から求めた平面座標に合わせる作業となる。
この作業により、GPSから得る準拠楕円体座標(地球座標)の歪みを無くすことが可能となる。
道路土工(VRS方式)
※弊社ではVRSまたはRTK方式にて施工します。

ローカライゼーション実施

切土法面整形状況

床付整正状況

掘削作業状況

盛土法面整形状況

盛土法面整形状況

路床天端整正状況

路床天端生成時モニタ
河川土工(VRS方式)
※弊社ではVRSまたはRTK方式にて施工します。

ローカライゼーション実施

段切り施工状況

高水敷整正状況

法面除雪状況

粗石整正状況

水中部の掘削状況

水中部の掘削状況

水中部掘削時のモニタ

水中部掘削時のモニタ
ほ場(VRS方式)
※弊社ではVRSまたはRTK方式にて施工します。

ローカライゼーション実施

切土部掘削状況

用水部床堀状況

基盤整正状況

畦畔盛土状況

畦畔盛土状況

基盤整正状況